

In the previous post we’ve gone over the CC-65 probe structure and schematic, and noted a few things that can be done to improve its performance. Other than modifying the probe with higher spec parts, there were a few design decisions and potential issues that were discussed. In this post I plan translate the previous discussion into actual measurements and modifications to the probe. I will cover only part of the circuit in this post, and will cover the rest in a follow up post. This time we’ll have a look at the power-supply and biasing circuit, while the actual amplifier/signal path will be covered in the next post.
I should start by saying that the parts shortage observed nowadays is affecting this project too, it is one of the reasons it took such a long time to get something done. In fact, even now, I’ve had to opt for some replacement parts which weren’t my preferred option, or else it would call for months of wait for parts to be back in stock. With that said, lets move on to some actual measurements.
First things first
First thing I did after getting my probe were to make a few basic measurements with it, and have a look inside. I noticed a few things that didn’t seem very promising. First, the gain error on my unit is well outside spec with >10% error on DC signals. The gain error is also changing with the polarity of the signal. Both of these combined mean that there is a need to trim the gain and the balancing of the sensors at the input. Next thing I noticed was the rails voltage. Measuring inside the probe, the positive rail is 3.3V (3.22V measured), while negative is -3.8V (with ~11.5mA draw from the battery). Why would you want to waste so much voltage on the negative rail when the sensors at the input are shifted toward the positive rail?! Not only that, this means that if we sum the two, and add a small margin for the LDO to remain with minimal headroom, the input voltage should be >7.2V. This is wasting away so much of the batteries energy. What’s even worse is that the low-battery indicator only lights up at a few 100’s of mV’s below that. So by the time it does eventually light up, you are outside of regulation already. Not only that, the choice of U6 isn’t a great one for the LED drive for low battery indicator, at least not the way its implemented in this probe. It has a limited current drive ability in this direction. This in turn means that while the LED lights up at 6.8V, its not able to turn the LED on at 6.5V. This can probably be even worse across units, so its possible to have a very limited voltage window where the low-battery indicator would actually light up.
Next I’ve started with a few simple measurements of the probe in its stock configuration. I did most of these on my audio measurement setup because of the limited BW of signals involved. I did look at a few of these on the scope before doing so, but decided not to post these figures as they offer no additional info for the moment.
First is the frequency response of the probe, as can be seen in Figure 1. This was done with a low amplitude of 20mArms in this setup, and can look different at increases currents. Its -3dB BW is at ~26KHz, which easily meets the spec of 20KHz.

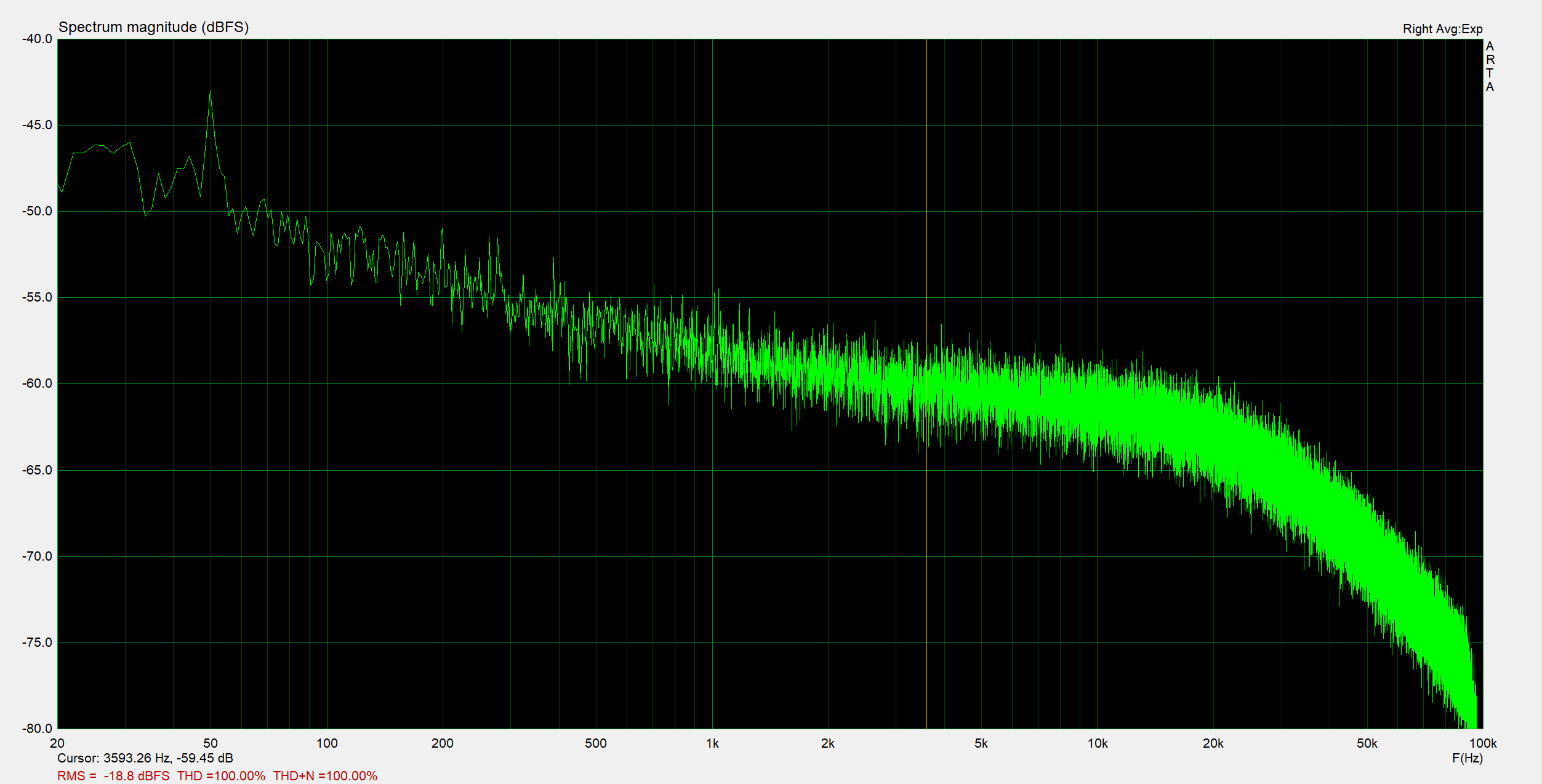
Next I wanted to measure the output noise of the probe while its sitting on my bench. Note this isn’t shielded in any way, its open to the environment and I’ve even had the case of the probe open during this measurement. Additionally, the measurements were all taken with the measurement pre-amplifier in the signal path, with the probe ground properly grounded to reduce CM noise. For the output noise measurements I’ve used the 60dB (X1000) gain setting on the pre-amplifier.

There are three interesting things that we can take from this measurement. First, there see there is some 50Hz (and harmonics) pick-up. This is to be expected with such a probe, especially with the case open, sitting on a bench full of electronics equipment (although most of it wasn’t operating during this measurement). Despite that, its not very strong, and clearly doesn’t dominate the overall energy in the observed spectrum. Next you see the 1/f noise rises at <1KHz, which is in good agreement with the datasheet for the P272C op-amp used in this probe. What’s more interesting to see, is that there seems to be a little “hump” at 3-3.5KHz, which we’ll have a closer look at in a few sentences. Since this measurement has no absolute units, but rather dBFS unit, its not clear what the total noise is. However, using the pre-amplifier’s integrated RMS meter the total noise was found to be 0.32mVrms. This is in fairly good agreement with what we’ve estimated the noise of this probe to be in the previous post. We’ve estimated it would be 0.25mVrms while assuming a 20KHz -3dB BW and neglected 1/f noise. If we adjust this for a 26KHz -3dB point this will jump up to 0.28mVrms. Add to that the fact my probe has >10% gain error which I see when measuring current with it, and you get 0.31mVrms, which is basically identical to what is being measured.
Positive supply rail
Lets turn our attention to the positive supply rail driven by an LDO, to see if this could be the source of the 3.5KHz tone. I’ve probed the positive supply rail and recorded it over time, as well as its FFT, as seen below. Note that these measurements are done with a 40dB (X100) gain on the measurement setup, therefore scale Y axis accordingly in the time domain.


Its clear this isn’t a clean DC rail voltage, and there is a dominant tone there we don’t expect. The spectrum doesn’t look like a simple oscillation though, seems like there are 2 different things happening there. One is the dominant tone at ~3.5KHz, the second is the elevated noise at somewhat lower frequency. What’s even more interesting to note is the the main hump is at the frequency where we’ve seen the hump in the noise of the probe. Trying to improve things with additional capacitance at the output (as well as to the negative rail) seemed to have little affect, and typically in the undesired direction. This is expected as such LDO don’t appreciate low ESR output caps in most case, so reducing the ESR that is already there by additional capacitor in parallel won’t help. What did seem to improve things was additional capacitance the the input of the LDO. After adding a 10uF ceramic capacitor there, the results look as shown below.


As can be seen, the main tone is still there, although it is now ~7dB lower. The content at 2.5KHz is now gone though. Additionally, the total integrated ripple/noise at <100KHz is now ~6dB lower and falls under 200uVrms, which is a typical number for such a “jelly bean” LDO.
I’ve decided this might be a good opportunity to replace the LDO with one I know the spec for. I went with the LP2981 3.3V variant. Its pin compatible, and I know what its dropout and other specifications are, which will be useful for future steps of reducing the minimum supply voltage. After replacing the LDO with it, I’ve repeated the measurements, and the results are attached below.


First thing you note is that this tone is still there. This is a bit disappointing actually, but there are a few additional things to note. First, it is now an additional ~10dB lower than it previously was. Second is that the wide-band noise around these frequencies is now ~10dB lower than it previously was which is why we can even notice this hump. If it wasn’t for the reduced noise, the hump wouldn’t have been visible. Total integrated noise and ripple on this rail is now ~5dB lower than the previous measurement, and a whole 10dB lower than it was with no modifications at all (now <100uVrms).
So the positive rail is now better (cleaner) than it was, but is it good enough? We can still see that tone when we probe the rail, but the real test would be to look at the output signal of the probe and see if its visible there. So lets repeat the same noise measurement for the probe output as we did before (figure 2). This time I’ve zoomed in so its easier to spot any issues if they are present.
This time, even when zoomed in, there is no apparent hump in the output spectrum. This means that while we know there is still something there on the positive rail (and perhaps somewhere else too), its now sufficiently small to be hidden by the inherent noise of the probe amplification circuit. Therefore, at least for the time being, the positive rail seems to be good enough to move forward.
Down the rabbit hole – sensor bias circuit
So far we’ve improved the positive rail, but it can be improved further, as there’s a very strong indication as to what is causing this tone we are seeing. Additionally, once you consider what the source of this tone actually is, you realize it can potentially result in a significantly larger problem later on. If you went over the first post I’ve published on this probe, I’ve discussed there the faults in the design of the biasing circuit for the sensors. We went over the circuit around U1-2 and C1 which is inherently unstable by design. This circuit is driving the bias node of the sensors (voltage over C1) from the positive supply via a PNP device. Therefore, any instability there would result in a dominant frequency at which current is taken from the positive supply rail. Given the finite load regulation of the LDO, this would result in the tone we’ve seen on the positive rail. So now lets have a look at that biasing circuit with a probe.

To start off with a reference measurement, I’ve set the measurement setup to have the same gain as in the previous measurements of the positive rail, and measured the spectrum over C1. The result is shown below in figure 11. Interestingly enough, we see the same tone, except its now higher in amplitude than it is on the positive rail. This is a clear indication that we are now measuring closer to the source of this undesired tone.

This leads us to a few conclusions. The first, is that the problem is actually far worse than we’ve expected. If you consider the fact this bias voltage sets the current through the sensors, which in turn sets the sensor gain, the conclusion is that this tone will modulate the input signal. In simple terms, this means that while we didn’t see it in figure 9 since we were measuring with no signal, once a large enough current is present at the probe input, this tone will once again be seen at the output. The frequency and magnitude of that tone at the output would depend on the input signal in that case. Second conclusion is that this needs to be fixed.
Thankfully, fixing this issue is very easy to do. All we need to do is to provide a negative feedback path which is of greater magnitude than the positive feedback at the frequency of this tone. One way to do this is to place a coupling capacitor between the output of U1-2 and its inverting input. To calculate the minimal size of the capacitor we have to look at the equivalent impedance at that point which is ~R7||R10=~5.9Kohm. Therefore the minimal capacitor value in this case would be:
This is just the bare minimum value, and would not provide sufficient phase margin to completely fix the issue. There can also be significant variation between different units and change with temperature or supply voltage. Even manufacturing spread of the sensors (resulting in a different DC bias current due to different sensor resistance) would alter this by resulting in a different gm in the PNP transistor. Therefore as a minimum I would recommend 100nF. I’ve increased this further as this path needn’t be fast, and chose a 1uF capacitor. Following this modification, the voltage over C1 now looks much better. The tone is completely gone, the AC RMS voltage over C1 is now a full 14dB lower it previously was, that is x5 lower noise by adding one small capacitor. This is noise you care about, since it is what’s setting the gain of the sensors, so if this is noisy, the sensor output is noisy.

Now lets measure once again the positive supply rail, and see how it looks once the source of the problem is fixed. As figures 13-14 show, the supply rail is now as clean as we expect it to be for such a circuit.


Negative supply rail
As I’ve mentioned previously, it makes no sense in my opinion to use so much of the battery voltage for the negative rail, while the circuit is mostly offset toward the positive rail due to the sensors bias being derived from it. Therefore, I aim to reduce this rail voltage from the -3.8V I’ve measured so far (set by D4) to -2.5V as this seems to meet all the requirements I’ve had. These include sufficient voltage to operate the op-amps with the desired signal swing while meeting CM voltage limit at the input and output swing of the op-amps with the op-amps I plan on using, as well as effective use of the battery energy with lower minimum operating voltage. I’ve opted for a 2.5V shunt regulator ATL431L. This has lower voltage than the stock zener diode, as well as lower dynamic resistance which improves regulation considerably. After verifying the DC voltage of the rail (where my meter read -2.5000V :)), I’ve compared the spectrum of the negative rail to what it was before replacing the zener. Both of these can be seen in the figures below.


Its clear that the shunt regulator is doing a far better job, with the spectrum not only flat, but also much lower noise (~12dB, or X4 lower to be exact).
It’s important to note here, that unlike D4 which is a passive zener diode, the ATL431L shunt regulator has a potential instability under some operating conditions due to its feedback loop. With 2.5V voltage and a few mA’s of current through it (dominated mostly by the sensors bias current), the datasheet actually shows a very limited range of capacitance that it can support while still being stable. However, this is for low ESR (<0.02ohm) capacitors and a high resistance path to the voltage regulator. For the CC-65, there is no direct capacitor present there, instead its a combination of a couple of capacitors in series, with some significant traces resistance in series, and there is no series resistor to the LDO. SLVA685 offers some additional information for a more practical use case, and in practice, in the CC-65 the equivalent circuit doesn’t meet these minimum requirements. However, it isn’t a correct model to use either because of the LDO placed directly in parallel to this capacitor which affects the location of the poles, unlike the resistor used in the test circuit in the datasheet. Therefore, I’ve verified the stability by measuring the negative supply rail voltage, which verified it is stable. This was repeated with the scope to make sure there’s nothing there at frequencies beyond the capabilities of the audio measurement setup I’ve used for the figures above.
One last thing that is left to do is modify the voltage divider set by R31/R32 to have the low battery indicator turn on at a lower voltage. Using 3.3V for the positive rail, 2.5V for the negative one, and allowing for 200mV headroom for the LDO, we are left with 6V which is far better than what it was before modification (~6.8V indicator, but LDO dropped out of regulation at >7V). This means that the voltage divider should cross the 1.24V threshold when the battery voltage is at 6V. Either replace R32 with a 600K resistor (604K/619K are more standard values and will result in threshold error of 15mV/71mV accordingly), or replace R31 with 258K resistor (249K is a standard value an will results in error of 80mV).
Figure 16 shows most of the mods covered in this post, with the exception of the LDO which is hiding behind the electrolytic capacitor.

Figure 17 shows a schematic view summarizing the changes I did to my CC-65 probe in this post. I’ve used the schematic posted here, and marked on it the changes described in this post. The information in this text is more comprehensive than the schematic though, with additional freedom in parts selection as well as trade-off in some parts selection. The LDO replacement is marked as optional on the schematic, as it has improved the supply rail, but has marginal effect on the actual signal performance of the probe as a whole. With the low cost of the replacement LDO, I recommend using it over the stock part.

Summary
To sum up this post, there were two issues observed on the supply rail as well as the probe output signal which indicated a problem with the power/bias portion of the circuit.
The root cause for the dominant tone was found to be the sensor biasing circuit with insufficient phase margin. It has been modified to fix the issue and reduce effective input noise on the sensors bias which would modulate the sensor signal.
The second issue was an additional marginal instability of the LDO which was caused by the lack of decoupling capacitor before the LDO. This was fixed and when combined with the fix in the bias voltage circuit resulted in a clean supply voltage with no noise peaking or other tones.
Additionally, both the positive rail and the negative rail regulators U5/D4 respectively, were replaced with superior parts LP2981/ATL431L respectively. This improved noise as well as load regulation. The negative rail voltage has been reduced from -3.8VDC to -2.5VDC to allow using more of the energy stored in the battery. Finally, the low-battery indicator threshold voltage has been modified accordingly.
In the next post on this topic I will go into measurements and modification of the signal path itself, along with the DC offset correction circuit. I’m still waiting on a few parts to arrive before I can move forward with it, so it might take some time before I get to it.
Did you mean atl431LI as opposed to atl431L? I was having difficulty finding any info on the atl,431L.
Any preference as to the type of capacitor you recommended?
Also, where is your preferred place to source these chips?
Excellent info, this has helped me immensely.
Hi Ryan,
Glad to hear this was of interest to you.
431LI is right, as long as the L is there it should be the same part.
As for capacitor, there is no need for high quality or special cap. X7R was what I’ve used for supply, its only there to offer some local decoupling to reduce the impedance to the battery at these frequencies that can potentially upset stability.
As for where to source, really up to you, they are jelly-bean parts mostly. I’ve ordered from a local distributor for the single part I was missing, but otherwise I would prefer Mouser for most orders I make. This can easily change according to where you are located around the world.
Hi Anatoli
sorry , could you let me know what instruments have you used to analyze and calibrate clamp ?
How can a novice recognize the improvement before and after the modification if he does not have much instrumentation ? (just only an oscilloscope) I mean a simple comparison circuit.
Have you tried with the use of new modern LDO like LT3042 or TPS7A02 ?
and the use of IA to analize better options 😀 ?
It is possible to reduce positive rail down to 3.0V ? to optimize battery use ?
ThankU so much for your exquisite analisys.
I buyed this clamp in 2019 for 35 eur and want to optimize it.
I see actually it is for x2 or x3 the price I paid. wooow
Hi Andoni,
The measurements done here are with my laptop with an external soundcard and my Measurements Pre-amplifier.
For low noise measurements its a great tool. As a beginner on a budget you can build a simpler and cheaper pre-amplifier (AC coupled with gain of 20-40dB) and use a simple scope.
A scope without it will have limited noise floor, although it would suffice for most things related to this specific project.
LT3042 and its siblings aren’t a good match. Their high quiescent current and headroom requirements would limit usability. Their noise benefit is not of value as other noise sources are more dominant by this point.
As for IA and lower voltage, I didnt look into this, but you can give it some thought if its of value for your use case.
Anatoli.